Un hombre denuncia que su mujer y su familia han secuestrado a sus hijos: "Se los han llevado sin consentimiento ninguno" Lucía Ortega Prieto José Ramón García ha denunciado la desaparición de sus hijos en México, país natal de su esposa.Detenidas dos personas por secuestrar a un hombre al que exigían 500.000 euros en criptomonedas
Un bebé muere asfixiado después de que su madre le amamantara en México 20minutos La niña de dos meses comenzó a tener problemas para respirar y la llevaron al hospital donde falleció. Muere un bebé por tosferina, una infección de la que no estaba vacunada la madre.
El vídeo viral de Rels B en el que desata la locura de sus fans de México al presentar en exclusiva su nuevo disco, 'a new star (1993)' 20minutos El cantante mallorquín publicó 'La vida sin ti', único adelanto del álbum, acompañado por Lía Kali.Animal Sound confirma sus primeros artistas con Myke Towers como cabeza de cartel.
Polémica por el ritual de sacrificio de una gallina en el Senado de México EFE Esta ceremonia estaría enmarcada en "La Ofrenda por el Día de la Lluvia (Tláloc)", según medios locales.Cinco caballos del Ejército británico siembran el caos en el centro de Londres y dejan cuatro heridos.
Iberdrola dispara un 86% sus ganancias en el primer trimestre del año por las plusvalías por México EP La compañía energética española obtuvo un beneficio neto de 2.760 millones de euros hasta el mes de marzo. Iberdrola apuesta por la digitalización y la innovación en redes para potenciar los servicios esenciales.
Noboa promete "el comienzo de una nueva era" para Ecuador en la apertura de urnas para la consulta Carla Pérez del Río La consulta electoral constará de once preguntas de las cuales cinco tomarán forma de referéndum.Más seguridad y menos derechos: Ecuador va a las urnas para decidir sobre reformas legales.
Unos 400 migrantes cruzan por la fuerza a Estados Unidos desde Ciudad Juárez EFE El grupo se ha logrado colar a la altura de la puerta 40, donde la alambrada de navajas es mínima.Cuatro pateras con 278 migrantes han llegado a Canarias este miércoles.
Díaz Ayuso viaja a México para asistir a los Premios Platino de cine iberoamericano M. T. F. La presidenta madrileña también intervendrá en el Foro Internacional ONU sobre turismo y cultura en Cancún.La oposición reprocha a Ayuso su gestión en vivienda y ella defiende su plan de choque.
Así será la boda del hijo pequeño de José María Aznar con una millonaria: en México, en Navidad y entre grandes fortunas 20minutos Renata Collado es fotoperiodista, naturalista, modelo y productora. Alonso se dedica a las finanzas y los negocios.La sorprendente amistad entre Íñigo Onieva, marido de Tamara Falcó, y el abogado de la familia de Arrieta.
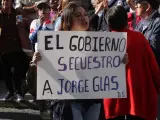
La CIDH condena intrusión en la Embajada de México y llama a Ecuador a proteger a Jorge Glas EFE La CIDH ha recordado a Ecuador que Jorge Glas es beneficiario de medidas cautelares desde 2019. Jorge Glas denuncia tortura física en su detención: "Me tiraron contra la pared y comenzaron a darme puntapiés y rodillazos".
La ministra de Trabajo de Ecuador denuncia por traición a la patria al expresidente Rafael Correa EFE Lo ha hecho a título personal y con motivo de las declaraciones del exmandatario sobre unas hipotéticas represalias de México contra el país.Jorge Glas denuncia tortura física en su detención: "Me tiraron contra la pared y comenzaron a darme puntapiés y rodillazos".
Jorge Glas denuncia tortura física en su detención: "Me tiraron contra la pared y comenzaron a darme puntapiés y rodillazos" EFE El exvicepresidente solicita que su detención sea anulada y que el Estado ecuatoriano lo entregue a México.México pide suspender a Ecuador de la ONU tras el asalto a su embajada en Quito.
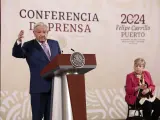
México pide suspender a Ecuador de la ONU tras el asalto a su embajada en Quito EFE El presidente mexicano ha pedido la solidaridad del resto de países "porque es un asunto de todos".México rompió las relaciones diplomáticas con Ecuador tras la detención de Jorge Glas en su embajada.
Exvicepresidente de Ecuador Jorge Glas está en huelga de hambre en la cárcel, dice su abogada EFE Glas se encuentra en La Roca, la cárcel de máxima seguridad de Ecuador.Jorge Glas, la mano derecha de Correa cuya detención provocó una crisis diplomática y que podría haber intentado suicidarse.
La Casa Blanca condena el asalto de Ecuador a la embajada mexicana tras revisar los videos EFE Un asesor de Biden vio las imágenes y concluyó que las acciones de Ecuador estuvieron "equivocadas".Jorge Glas, la mano derecha de Correa cuya detención provocó una crisis diplomática y que podría haber intentado suicidarse.
Jorge Glas, la mano derecha de Correa cuya detención provocó una crisis diplomática y que podría haber intentado suicidarse CH.L. Condenado a 8 años por corrupción, se había refugiado en la embajada mexicana en Quito.El exvicepresidente ecuatoriano intenta suicidarse tras su detención en la embajada de México en Quito.
López Obrador difunde un vídeo del asalto a la Embajada de Quito: "A México se le respeta" EP Para el presidente mexicano, la actuación de Ecuador debe contar con "el respaldo de otras potencias".El expresidente de Ecuador Correa pide a la comunidad internacional que presione a Quito para que permita la salida de Glas.
De cómo Ecuador ha pasado de defender la inviolabilidad de su embajada en Londres a entrar por la fuerza en la de México Chema Lizarralde El Gobierno de Correa dio asilo a Assange en su embajada de Londres durante 7 años.El exvicepresidente ecuatoriano Jorge Glas intenta suicidarse tras su detención en la embajada de México
Los 19 gatos del palacio presidencial mexicano hacen historia: una nueva norma les asegura cuidados de por vida AP López Obrador les ha declarado “activos fijos vivos”, son los primeros animales en México que reciben ese título."Los gatos ya son un símbolo de Palacio Nacional. Tenemos que dejarlos asegurados".